Part 1: A Solid Ring
To find the period of a solid ring oscillating at small angles, we needed to find an equation for it's acceleration as a function of a negative constant and displacement. From there we would be able to find its period. Once we had this value, we would then use LoggerPro to find the actual period of the pendulum using a photogate. (see Fig. 1)
 |
| Fig. 1 Using LoggerPro and a photogate, we were able to find the period of the solid ring as it swung through small angles. |
Since the ring was solid, we had to take its moment of inertia relative to both of its radii. When we measured the two radii, we got values of 0.05765 m and 0.06975 m respectively. The equation for the period of this pendulum would be given by 2*pi divided by it's angular frequency. After going through our calculations, we found the predicted period of the pendulum to be 0.718 seconds. When we ran the actual experiment, we found the period to be 0.720 seconds. Thus, we had a percent error of 0.376 %. (see Fig. 2 and Fig. 3)
 |
| Fig. 2 We were able to calculate the period of the solid ring be setting the angular acceleration into this form. |
 |
| Fig. 3 Using LoggerPro, we were able to find the period of the solid and found that we were off by only 0.376%! |
Part 2: An Isosceles Triangle about its Apex
To find the period of an isosceles triangle about its apex, we had to find two unknowns first. First, we had to find its moment of inertia. Next, we had to find its center of mass. Our calculations for finding the center of mass of the triangle can be seen in Fig. 4 and for the moment of inertia in Fig. 5
 |
| Fig. 4 |
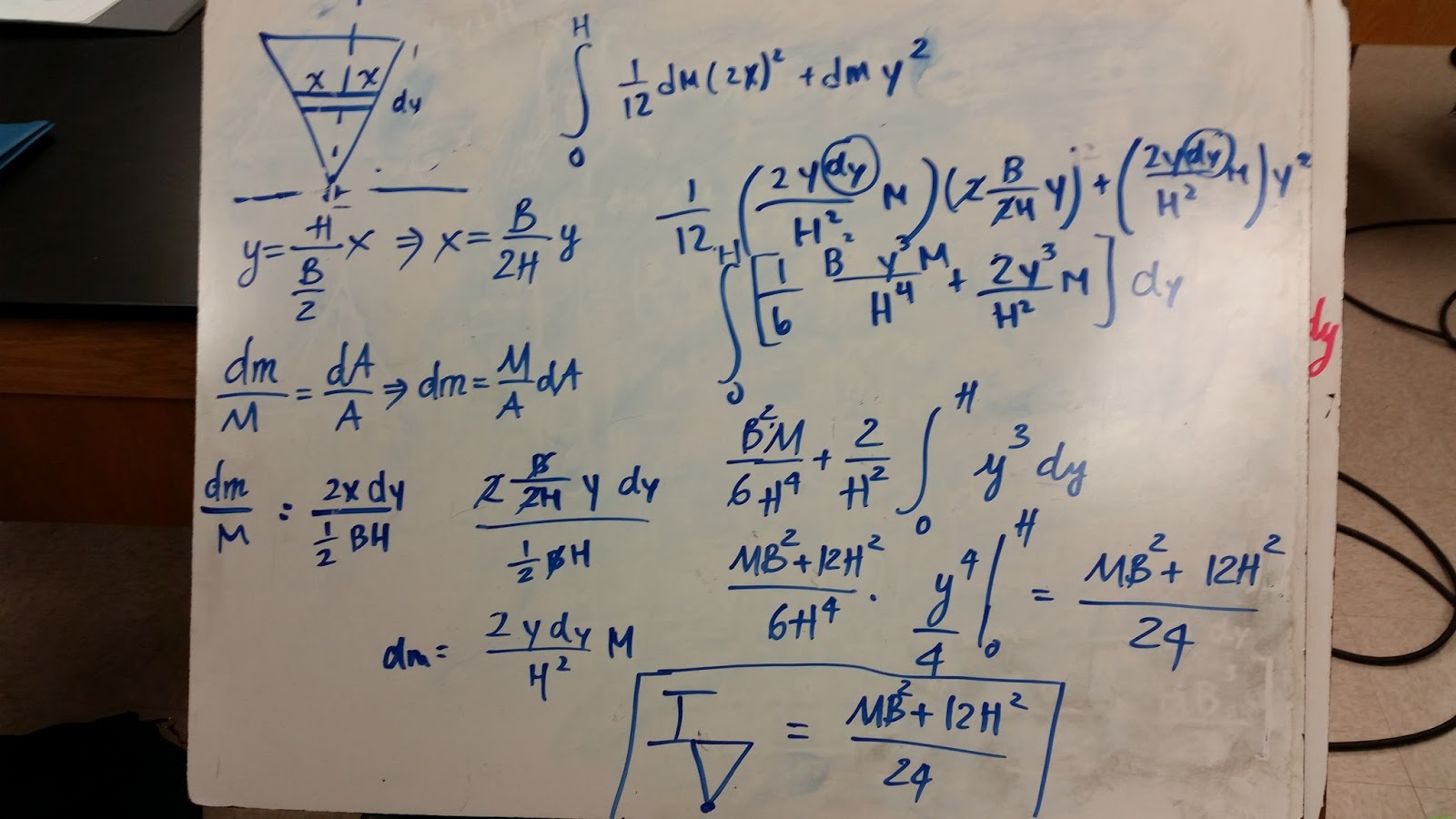 |
| Fig. 5 NOTE: There should be a "M" for mass next to the 12 in the final equation. |
Once we had our equations we mad our prediction for the period, which turned out to be 0.703 seconds. (see Fig. 6) To test this, we cut out an isosceles triangle and measured its height and base to find a prediction for its period. (see Fig. 7)
 |
| Fig. 6 We calculated the period to be 0.703 seconds and we were off by only 0.92 % |
 |
| Fig. 7 We cut out the isosceles triangle that we would use to test our theoretical value. |
Part 3: An Isosceles Triangle about the Midpoint of its Base
To find the period of an isosceles triangle about the midpoint of its base, we again had to find an expression for its moment of inertia. Once we had this, we use Newton's Second Law to find an expression for the angular acceleration as a function of a negative constant and displacement. Once we had this, we were able to find its period. Our calculation for the moment of inertia can be found in Fig. 8.
 |
| Fig. 8 |
 |
| Fig. 9 Again, we used the formula for period being 2*pi/angular frequency to find our value for the period. |
 |
| Fig. 10 We found that we had a mere 0.92 % error in our calculation from that of LoggerPro. |
We found that we had a percent error of 0.92 %.
Part 4: A Semi-Circle about the Center of its Curved Edge AND the Center of its Base
To find the period of oscillation of a semi-circle about the center of its curved edge, we decided to first find its center of mass. This would be required to find the period of oscillation about the center of its curved edge and the center of its base. To do this, we decided to plot the semi circle and take its dm with respect to many little rectangles that would compose the semi circle. To see our full calculation, see Fig. 11. We found that the center of mass 4R/3pi above the center base of the semi circle.
 |
| Fig. 11 Finding the center of mass. |
 |
| Fig. 12 In the red is our moment of inertia of the semicircle oscillating about the center edge of its curve. In the blue is the moment of inertia of the semicircle oscillating about its center base. |
 |
| Fig. 13-1 We found that our value for the period was only 0.6% of LoggerPro's value. |
 |
| Fig. 13-2 Period LoggerPro found us for the semicircle oscillating about the center edge of its curve. |
 |
| Fig. 14-1 We had to take into account the altered shape of the semi circle. It was not a completely circular curve, which may have correlated to our higher percent error. |
 |
| Fig. 14-2 Period LoggerPro found for us for the semicircle oscillating about the center of its base. |
We found that our first prediction for the semicircle oscillating about the center edge of its curve was good, in that we yielded only a 0.6% error. However, our second run for the semicircle oscillating about the center of its base had a larger 1.3% error. This may have been due to the fact that our semicircle was not completely round, thus throwing of its actual moment of inertia.
Error and Conclusion:
Although the lab represented little error, we must still account for some issues. In cutting the shapes, we were unable to make perfect and exact shapes, which in turn may have altered the actual period of oscillation of the system. Another issue was finding the perfect point to have the triangle oscillating. Using cable rings, we tried to get the edge of the triangle and semicircle as close as possible to being at the pivot.
In all, however, the lab was successful and allowed us to verify the period of multiple oscillating pendulums.